PID Simulator
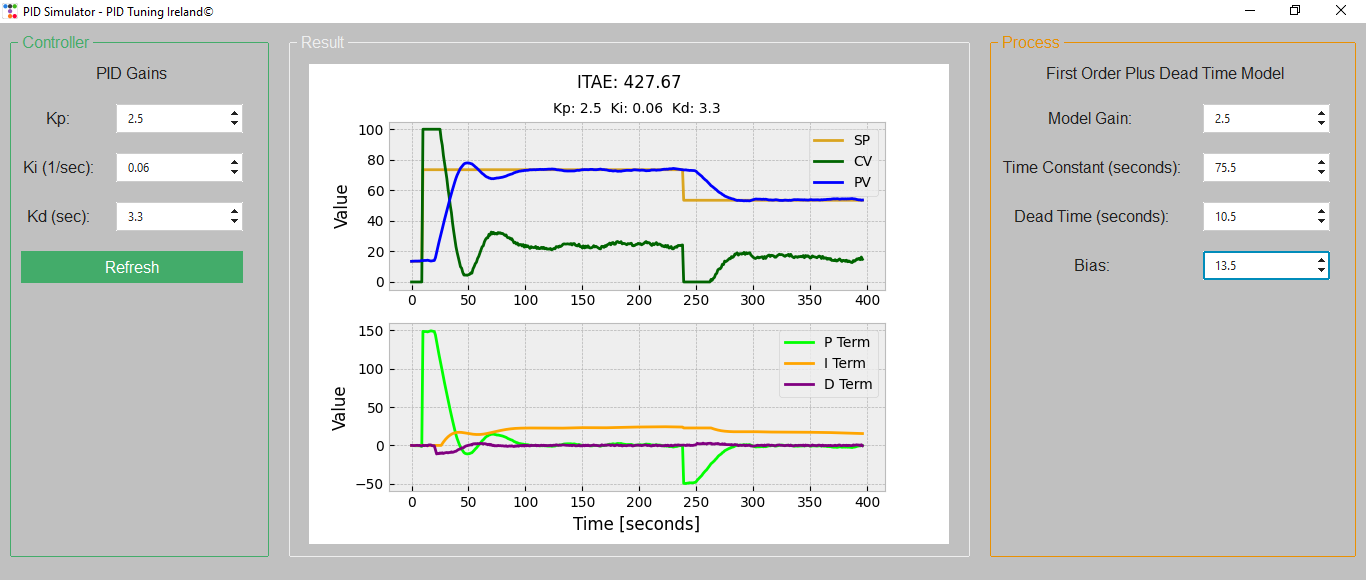
PID Simulator Instantiation Example
import pypidtune
pid_simulator = pypidtune.PIDSimulator(
pid_form="dependent",
pid_time_units="minutes",
init_model_gain=3.0,
init_model_tc=60.0,
init_model_dt=15.0,
init_model_bias=10.0,
init_kp=1.0,
init_ki=0.5,
init_kd=0.2,
)
pid_simulator.root.mainloop()
In this example:
- pid_form is set to ‘dependent’, indicating the PID controller form.
- pid_time_units is set to ‘minutes’, specifying the time units used in the PID controller.
- init_model_gain is set to 3.0, providing an initial gain value for the process model.
- init_model_tc is set to 60.0, setting the initial time constant of the process model.
- init_model_dt is set to 15.0, initializing the dead time of the process model.
- init_model_bias is set to 10.0, setting the initial bias of the process model.
- init_kp is set to 1.0, providing the initial proportional gain of the controller.
- init_ki is set to 0.5, providing the initial integral gain of the controller.
- init_kd is set to 0.2, providing the initial derivative gain of the controller.